Featured Resource
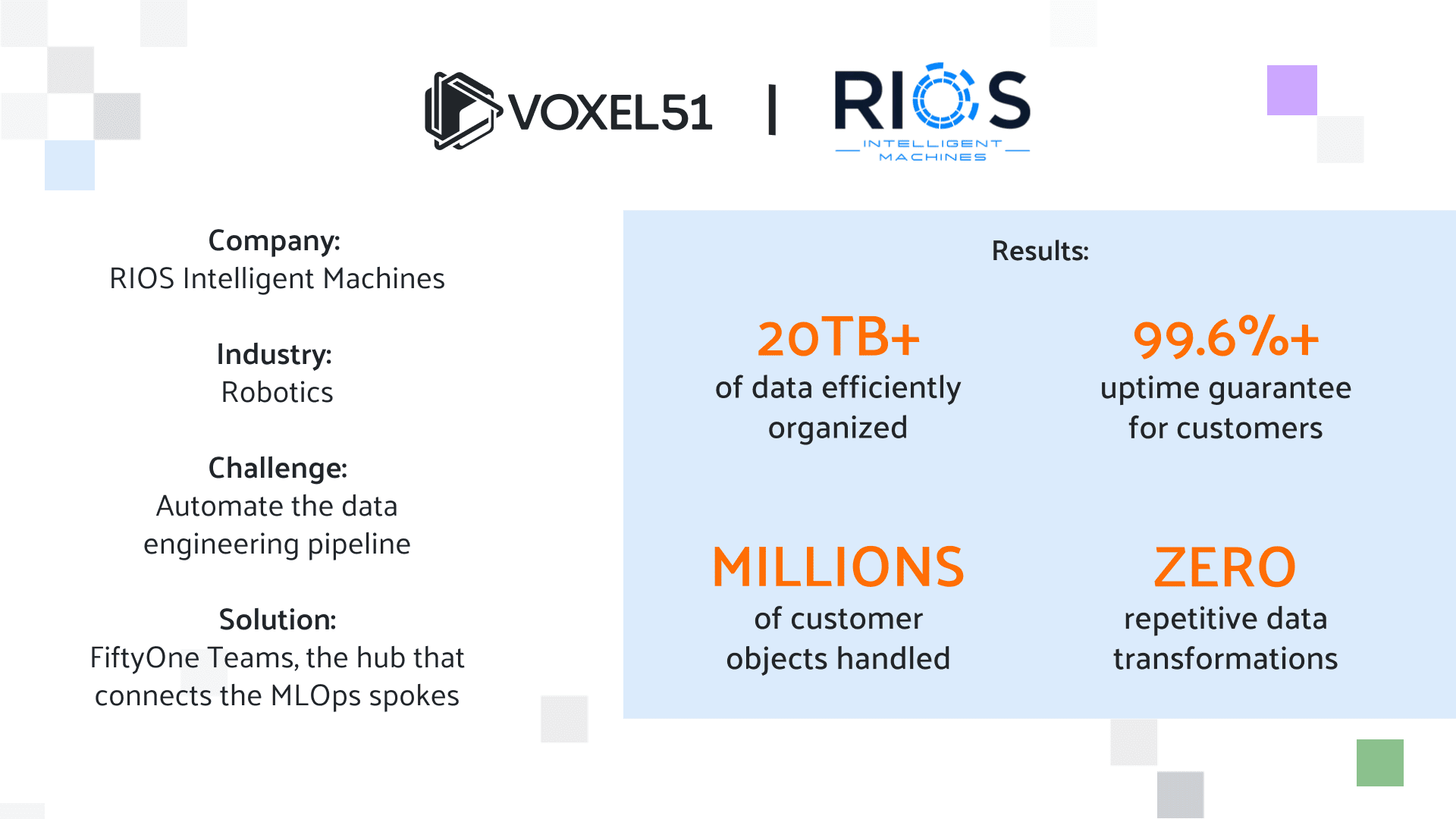
Featured Case Study

Voxel51 Events
Join Voxel51 and the FiftyOne community at these events to learn all about computer vision, machine learning, and AI.
Featured Resource
Featured Case Study
Join Voxel51 and the FiftyOne community at these events to learn all about computer vision, machine learning, and AI.