In this article
Key TakeawaysHow physical AI differs from embodied AI, robotics, and visual AIThe data is multimodal, and that’s the hard partWhy physical AI, and why nowHow physical AI actually works: the loopRally racing is your production realityThe stakes are physicalPhysical AI is a data problem, and evaluation is the gateScale, control, and your dataHow FiftyOne keeps the loop connectedThe world won't hold stillFrequently asked questionsSources
In this article
Key TakeawaysHow physical AI differs from embodied AI, robotics, and visual AIThe data is multimodal, and that’s the hard partWhy physical AI, and why nowHow physical AI actually works: the loopRally racing is your production realityThe stakes are physicalPhysical AI is a data problem, and evaluation is the gateScale, control, and your dataHow FiftyOne keeps the loop connectedThe world won't hold stillFrequently asked questionsSources
Talk to an AI expert

Physical AI is artificial intelligence that perceives, decides, and acts in the physical world through sensors and actuators, in systems like autonomous vehicles, factory robots, drones, and surgical robots. Unlike digital-only AI, its mistakes land in the real world: a chatbot that misreads a prompt writes a bad paragraph, but a robot that misreads the floor drops the part. Physical AI has to be right about a world that's messy, multimodal, and never the same twice.
Key Takeaways
- Physical AI acts in the real world. It perceives, decides, and acts through sensors and actuators in systems like autonomous vehicles, robots, and drones, and unlike digital-only AI its mistakes land in the real world.
- Data drives performance more than model size does. In Voxel51's 2026 State of Visual and Physical AI report, 89% of practitioners name data the primary driver of success, and the hardest, most valuable data is the long tail of rare, safety-critical events, so curation beats sheer volume.
- Multimodal fusion is the core data challenge. One system combines camera, lidar, radar, and other sensor streams that a team must align in space and time, then curate, label, and evaluate together.
- Improvement runs on a connected loop. Physical AI gets better through curate, annotate, and evaluate, where evaluation decides whether you can deploy and signals what to curate next.
- Proprietary data is the competitive moat. 72% of teams rely on proprietary data and 91% do in production, so the curate, annotate, evaluate loop has to run where the data lives, whether in the cloud, hybrid, on-premises, or fully air-gapped.
How physical AI differs from embodied AI, robotics, and visual AI
Physical AI is the full loop of sensing through acting in the real world. The neighboring terms we often treat as synonyms each name only a piece of it, and none of them quite fits.
| Term | How it differs from physical AI |
|---|---|
| Embodied AI | An agent that learns through interaction with an environment, often in simulation. It is the research lineage physical AI grew out of. |
| Robotics | The engineering of the machine itself, not the full sensing-to-acting intelligence. |
| Visual AI | The perception layer that lets a machine make sense of what it sees, one part of the loop. |
| Physical AI | The whole loop, sensing through acting, in the real world. |
The data is multimodal, and that’s the hard part
A physical AI system doesn't perceive through one camera. It perceives through many sensors at once.
| Sensor | What it captures |
|---|---|
| Camera | Color and texture |
| Lidar | Precise distance and shape |
| Radar | Range that sees through rain and dark |
| Inertial Measurement Unit (IMU) | Motion |
| GPS | Position |
| Wheel and joint encoders | Vehicle and joint movement |
| Microphones, time-series telemetry | Sound and system state (sometimes) |
All of it streaming together, all of it spatial and temporal, all of it to align into one coherent picture of the world.

This is the defining data challenge of physical AI. Many modalities each see something different and partial, and you have to line them all up in space and time, then curate, label, and evaluate them together.
The reference datasets in autonomous driving show the shape of it. nuScenes ships six cameras, five radars, and a lidar for full 360-degree coverage (Caesar et al.). The open RACECAR dataset from high-speed autonomous racing fuses lidar, radar, camera, and GNSS, and its authors released it on Hugging Face in both ROS2 and nuScenes formats so other teams can build on it (Kulkarni et al.).
When people say a physical AI team needs a multimodal data platform, this is what they mean. The work spans modalities. It's keeping camera, lidar, radar, and other sensors in one place, in sync, where you can see them together and reason about them together. Do that on tools that each handle one modality and you're stitching the world back together by hand.
Why physical AI, and why now
Physical AI is having its moment now for two connected reasons. The systems themselves are changing shape, moving from modular pipelines you could inspect stage by stage to end-to-end models that perform better but behave like black boxes (Chen et al.). When you can't open the model up, the data becomes the only place to understand why it acted as it did, and where it might fail next.
At the same time, the old edge from bigger models and more compute is flattening as both commoditize, so the data is what decides whether a system works at all. In Voxel51's 2026 State of Visual and Physical AI report, 89% of practitioners said data is now the primary driver of visual and physical AI success.
In DataComp, holding the model and the compute fixed and improving only the dataset produced large quality gains, which means the dataset is the lever you pull (Gadre et al.).
And the frontier is moving from the digital world to the physical one, where the data is multimodal and the volumes are enormous. NVIDIA frames its own physical AI work around the idea that these systems have to be "trained digitally first," on data (NVIDIA). The center of gravity has shifted from the model to the data, and physical AI is where that shift bites hardest.
How physical AI actually works: the loop
The clearest picture of that loop is more than twenty years old. In 2005, a Volkswagen named Stanley won the DARPA Grand Challenge by driving 132 miles across the Mojave desert on a course the teams received barely two hours before the start, as raw GPS waypoints (Thrun et al.).
Stanley's lasers could only judge the ground a short distance ahead, too short to drive fast. So the car taught itself. It took a patch of ground the laser had already confirmed was drivable, found those same pixels in its camera, and used them as live training examples for what "drivable" looked like, updating that model on the fly as the desert changed color under its wheels.
Curate a confirmed patch, annotate the surface, evaluate against the laser, retrain. The loop, running live, in the dirt.
DARPA's RACER program ran the same loop twenty-one years later, and far faster. In its eighth and final experiment, which DARPA wrapped up in January 2026, a driverless RACER vehicle crossed miles of unmapped Mojave Desert backcountry with no map and no operator, reading the raw terrain and choosing its own route.
The problem hadn't changed: terrain you've never seen, no usable map, adapt or fail. What changed is how quickly the loop turns.
Stanley updated a crude color model. RACER retrains a full perception model for a new environment, and where that once took weeks of retraining, it now takes about a day, according to program manager Stuart Young (DARPA). The loop is the durable answer to physical AI, and the whole history is the loop getting tighter.
Rally racing is your production reality
Real robots, real autonomous vehicles, and real drones operate in the open world: unmapped, with surface, weather, and light that change constantly, and data pouring in from every sensor at once, never the same twice. That is the actual operating condition for physical AI, and it's why the loop and the curation behind it are the whole job.
It's tempting to picture physical AI instead as a race car on a circuit, perfecting a line on a track it's memorized. That picture is comforting and wrong.
A closed circuit is the friendliest possible world for a machine. The track is fixed, mapped, and uniform, you already know the line, and the hard part is shaving milliseconds off a problem whose shape never changes.
Autonomous circuit racing is real and impressive, but it's closer to optimization than to intelligence. You're getting very good at a world you already have. Real deployment is the rally stage, run on ground no one has mapped.
The open world has a precise failure surface, and the literature names it: domain shift, distribution shift, and the long tail of rare events you could never enumerate in advance (Chen et al.). The long tail is the killer.
A data-centric survey of autonomous driving estimates it would take more than a trillion miles to cover the tail by brute-force collection, and that the rarest, most safety-critical cases are both the most important and the hardest to capture (Li et al.). Waymo built its open end-to-end dataset specifically around scenarios that show up less than 0.03% of the time (Xu et al.).
You can't collect your way to coverage. You have to find and keep the cases that matter.
The hardest cases are the ones you can't collect at all. Nobody can responsibly point a real vehicle at a flooded trail or a washout to capture what failure looks like, so those you generate, then curate as ruthlessly as you would real data, keeping every synthetic frame traceable to the real one it came from. We walk through that workflow in generating the off-road edge cases a robot can't collect.
The stakes are physical
The open world is unforgiving in a way digital AI never has to reckon with. In digital AI, a long-tail miss is a bad recommendation or an awkward sentence. In physical AI, a long-tail miss is a collision, a damaged part, a safety incident. The system acts on the world, so its mistakes land in the world, and the rare scenario that hurts someone is exactly the one your training data is thinnest on.
Physical AI is a data problem, and evaluation is the gate
The hard part of physical AI was never the model. It's finding and curating the rare, hard, multimodal cases, and then evaluating the system across modalities and under shift to know whether it's actually ready for a world that won't behave.
That last step is the one teams underinvest in, and it's the one that decides whether you can deploy. Evaluation in physical AI is more than a single accuracy number. It's scenario coverage, regression across model versions, and the ability to find where a system fails and why.
When TUM's autonomous racing team crashed during a competition, their own post-mortem traced it to a model that predicted only a single path for an opponent, and the fix was better prediction and harder testing (Hoffmann et al.). More raw data would not have helped.
Evaluation is how a physical AI team earns the right to put something into the real world.
Scale, control, and your data
Two enterprise realities sit underneath all of this. The first is scale. Physical AI generates petabytes of multimodal sensor logs, and the loop has to run at that size, well beyond a laptop's worth of samples.
The second is control. For the teams that feel this most acutely, in autonomous vehicles, defense, and regulated industries, the data can't leave their hands. The loop has to run where the data lives, whether that's the cloud, a hybrid setup, on-premises, or fully air-gapped.
And the reason is strategic as much as legal. Your sensor data, and the curation decisions you make on it, are the part of your physical AI program a competitor can't copy. In the 2026 State of Visual and Physical AI report, 72% of teams said they rely on proprietary data, rising to 91% in production.
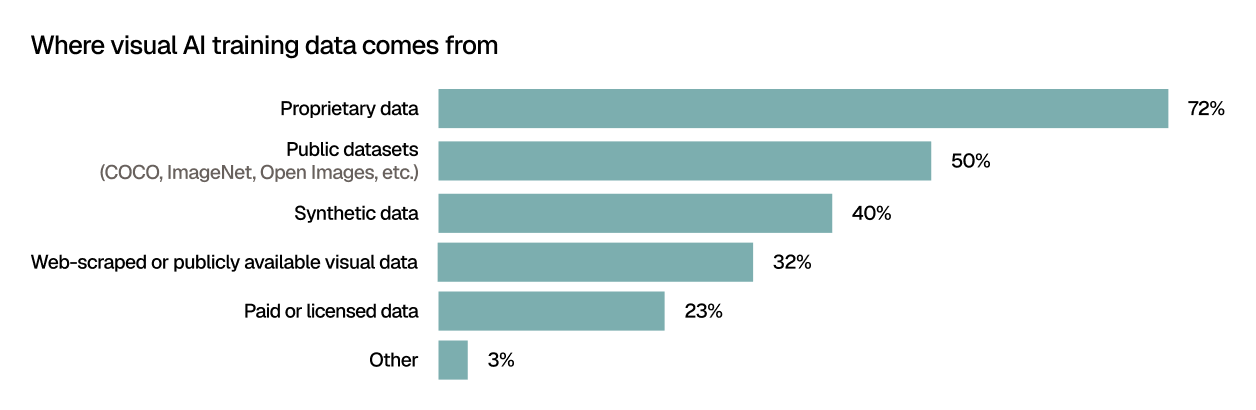
That data is the moat. Where it lives, and whether the curate, annotate, evaluate loop stays intact on top of it, is a decision worth making on purpose.
How FiftyOne keeps the loop connected
Voxel51 built FiftyOne for exactly this work, the multimodal data platform where curation, annotation, and evaluation run as one loop, on your data, wherever it lives. You can dig into data curation and model evaluation, or see how it shows up in robotics and autonomous systems. If you want the buyer's-eye view of what to look for, the physical AI data platform guide covers it.
The world won't hold still
Go back to that vehicle crossing terrain it had never seen. It didn't win by memorizing the desert, because the desert was never the same twice. It won by closing the loop fast enough to keep up with a world that kept changing. That's the whole job of physical AI.
The model matters and the sensors matter, but the teams that pull ahead are the ones who keep curate, annotate, and evaluate connected, so the system learns from every mile it's never driven before. Physical AI is a data problem. The work is the loop.
Frequently asked questions
What is physical AI?
Physical AI is artificial intelligence that perceives, decides, and acts in the physical world through sensors and actuators, in systems like autonomous vehicles, robots, and drones. It differs from digital-only AI because it has to operate in a real, changing environment where its mistakes have physical consequences.
How is physical AI different from embodied AI?
Embodied AI usually describes an agent that learns through interaction with an environment, often in simulation, and it is the research field physical AI grew out of. Physical AI is the broader, applied idea of AI systems that sense and act in the real physical world. In practice the terms overlap, and embodied AI works best as a parent concept.
What is an example of physical AI?
An autonomous vehicle is a clear example. It fuses camera, lidar, and radar to perceive the road, decides on a path, and controls steering and braking, then uses the outcome to improve. Robots, drones, and autonomous agricultural and industrial machines are others.
Why is physical AI considered a data problem?
Because the data is the bottleneck. Physical AI runs on multimodal sensor data a team must align, curate, and evaluate together, and the rare, safety-critical cases that matter most are the hardest to capture. Better data selection and evaluation drive better performance, and more data alone does not.
What makes physical AI data hard to work with?
Three things. It's multimodal, fusing camera, lidar, radar, and more that teams must synchronize. It's high volume, often petabytes of sensor logs. And the stakes are physical, so the long-tail edge cases you can least afford to miss are the ones your data underrepresents.
Sources
- DARPA, "RACER's Finish Line," January 14, 2026. https://www.darpa.mil/news/2026/racer-finish-line
- Thrun et al., "Stanley: The Robot that Won the DARPA Grand Challenge," Journal of Field Robotics, 2006. https://robots.stanford.edu/papers/thrun.stanley05.pdf
- Caesar et al., "nuScenes: A Multimodal Dataset for Autonomous Driving," CVPR 2020. https://arxiv.org/abs/1903.11027
- Kulkarni et al., "RACECAR: The Dataset for High-Speed Autonomous Racing," IROS 2023. https://arxiv.org/abs/2306.03252
- Gadre et al., "DataComp: In Search of the Next Generation of Multimodal Datasets," NeurIPS 2023. https://arxiv.org/abs/2304.14108
- Li et al., "Data-Centric Evolution in Autonomous Driving: A Comprehensive Survey of Big Data System, Data Mining, and Closed-Loop Technologies," arXiv, 2024. https://arxiv.org/abs/2401.12888
- Chen et al., "End-to-end Autonomous Driving: Challenges and Frontiers," IEEE TPAMI, 2024. https://arxiv.org/abs/2306.16927
- Xu et al., "WOD-E2E: Waymo Open Dataset for End-to-End Driving in Challenging Long-tail Scenarios," arXiv, 2025. https://arxiv.org/abs/2510.26125
- NVIDIA, "Cosmos World Foundation Model Platform for Physical AI," arXiv, 2025. https://arxiv.org/abs/2501.03575
- Duan et al., "A Survey of Embodied AI: From Simulators to Research Tasks," arXiv, 2021. https://arxiv.org/abs/2103.04918
- Liu et al., "Aligning Cyber Space with Physical World: A Comprehensive Survey on Embodied AI," arXiv, 2024. https://arxiv.org/abs/2407.06886
- Hoffmann, Sagmeister et al. (TUM), "Head-to-Head Autonomous Racing at the Limits of Handling in the A2RL Challenge," arXiv, 2026. https://arxiv.org/abs/2602.08571
- Voxel51 and Dimensional Research, "2026 State of Visual and Physical AI," May 27, 2026. https://voxel51.com/whitepapers/state-of-physical-ai-2026
Loading related posts...
© 2026 Voxel51 All Rights Reserved


